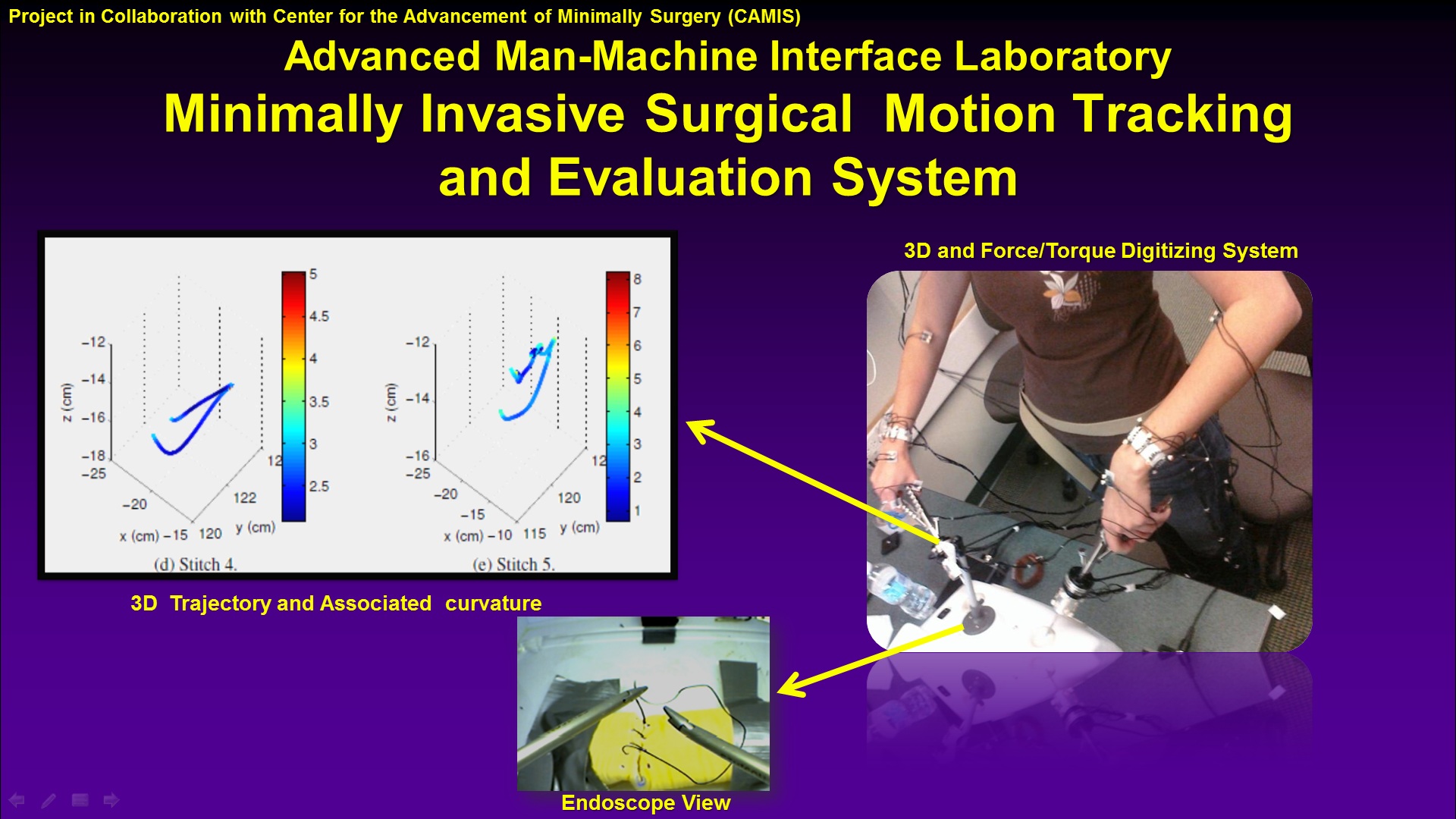
MIS has revolutionized general surgery because of its many advantages: minimal postoperative pain, few postoperative adhesions, minimizing blood loss, low risk of surgical complications, short hospital stays, and early return to normal activities. In MIS, access to the surgical site is obtained via small incisions. Visualization of the internal organs is performed using a small video camera within an endoscope, and actual surgical operations are performed using long slender instruments called laparoscopes. Common MIS procedures are: cholecystectomy, appendectomy, and hernia repair. Although MIS has several advantages over traditional open surgery, MIS is a complex procedure involving independent visual and manual skills. In most cases, skills learned during open surgery are not easily transferable to laparoscopic procedures. The combination of physical precision, safety, and visuo-motor constraints make MIS a very difficult procedure to learn and to master. In contrast to open surgery, MIS is performed with a restricted field-of-view, with displaced 2D visual feedback, and with distorted haptic (tactile and kinesthetic) feedback. Much research and development aims at improving visualization and haptic perception in MIS, but the problem of training remains unresolved, and potential solutions are only starting to appear. In addition, there is a need to objectively measure MIS performance in order to compare training methods and to eventually determine if a MIS surgeon has reached the dexterity level required to move from simulation to real patients.
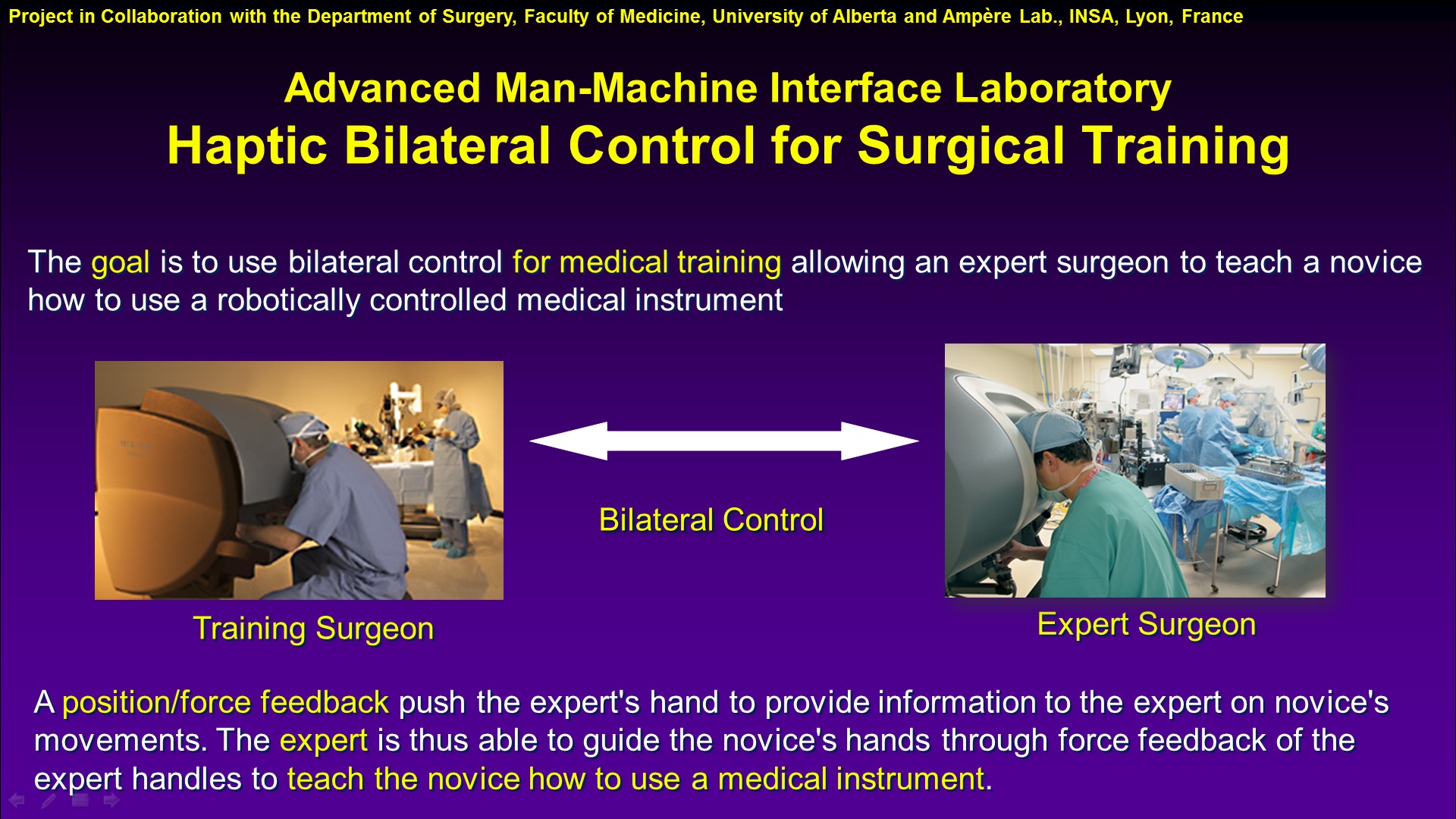
Our short term objective project TEMIS is to develop a system capable of comparing an expert surgeon and a trainee using measurements provided by bio-metric signals as they perform their tasks. Our goal is to compare not only dexterity but also task precision and safety. The long term objective is to determine if complex ambidextrous MIS manipulations can be transferred between an expert surgeon and a trainee by multi-modal visuo-haptic guidance using a What-You-Feel-Is-What-I-Feel (WYFIWIF) paradigm. The WYFIWIF paradigm has been shown recently to be a very effective approach at skill transfer and acquisition for a variety of applications. Both short term and long term objectives complement each other as we will use the measurements provided by the gesture acquisition system to design the visuo-haptic guidance system and to validate how efficient the system works.